
 |
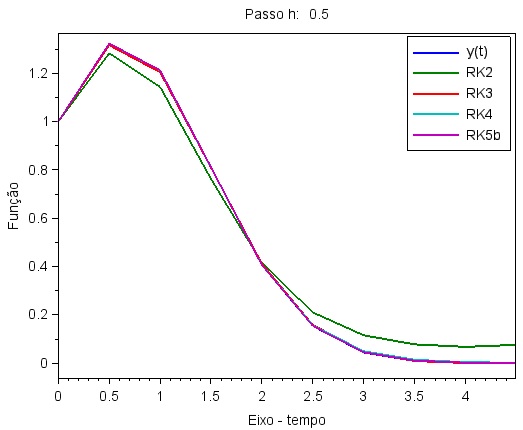
| Uso de um passo muito grande para solução de uma EDO, o método RK-2 apresenta um erro significativo. |
Em muitas situações, o método de Runge-Kutta (RK) de 4a. ordem tem precisão suficiente para resolver numericamente uma EDO (equação diferencial ordinária) - ver postagens antigas aqui neste mesmo blog (aqui) - de forma satisfatória. Entretanto, se for necessária uma maior precisão, podemos tentar um método RK de ordem mais elevada. Em casos extremos, um método ordem Runge-Kutta-Nyström ( RKN1210 12a./10a.) pode ser tentado. Nessa postagem, apresentamos uma comparação entre os métodos RK de ordem 2, 3, 4 (forma clássica) e 5 (método sugerido por Butcher - ver aqui a página desse pesquisador aqui). Existem várias fórmulas possíveis para esses métodos, aqui apresentamos as mais comuns. São elas:
RK-2:
\begin{align*} K_1 & = hf(t_k,y(t_k)) \\ K_2 & = hf(t_k + h,y(t_k) + K_1) \\ y(t_{k+1}) & = y(t_k) + \frac{K_1+K_2}{2}\\ t_{k+1} & = t_k + h \end{align*}
RK-3:
\begin{align*} K_1 & = hf(t_k,y_k) \\ K_2 & = hf(t_k + h/2,y_k + K_1/2) \\ K_3 & = hf(t_k + h,y_k + K_2) \\ y_{k+1} & = y_{k} + \frac{1}{4}(K_1 + 2K_2 + K_3)\\ t_{k+1} & = t_k + h \end{align*}
RK-4: \begin{align*} K_1 & = hf(t_k,y_k) \\ K_2 & = hf(t_k + h/2,y_k + K_1/2) \\ K_3 & = hf(t_k + h/2,y_k + K_2/2) \\ K_4 & = hf(t_k + h,y_k + K_3) \\ y_{k+1} & = y_{k} + \frac{1}{6}(K_1 + 2K_2 + 2K_3 + K_4) \\ t_{k+1} & = t_k + h \end{align*}
RK-5:
\begin{align*} K_1 &= h f(t_k,y_k);\\ K_2 &= h f(t_k+h/4,y_k+K_1/4);\\ K_3 &= h f(t_k+h/4,y_k+(K_1+K_2)/8);\\ K_4 &= h f(t_k+h/2,y_k+(K_3 - K_2/2));\\ K_5 &= h f(t_k+3*h/4,y_k+(3 K_1 + 9 K_4)/16); \\ K_6 &= h f(t_k+h,y5kb+(-3 K_1+2 K_2+12 K_3 - 12 K_4 + 8 K_5)/7); \\ y_{k+1} &= y_k + (7 K_1 + 32 K_3 + 12 K_4 + 32 K_5 + 7 K_6)/90; \end{align*}
Iremos testar a EDO:
\begin{equation*} \frac{dy}{dx} = \exp(-x^2/2) - yx; \end{equation*}
cuja solução analítica é \begin{equation*} y = (x+1)\exp(-x^2/2); \end{equation*}
usando os métodos RK descritos acima. Para saber mais sobre os métodos RK para solução de EDOs ver aqui e aqui.
Gráficos:
 |
| Comparação da solução analítica com as soluções numéricas. |
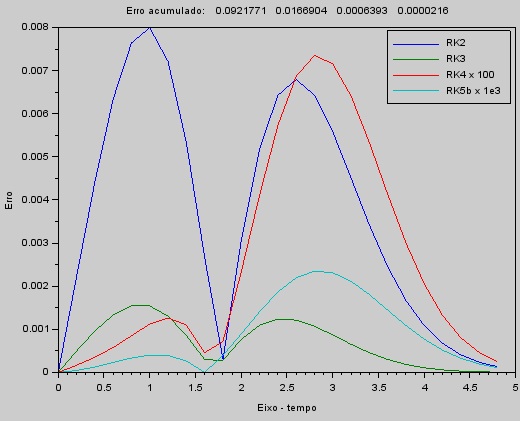 |
| Menor erro para os métodos RK de ordem mais alta. |
 |
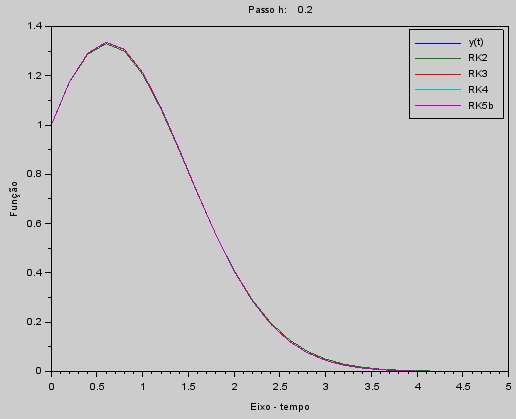
| Com um passo $h$ menor, menores os erros de todos os métodos. |
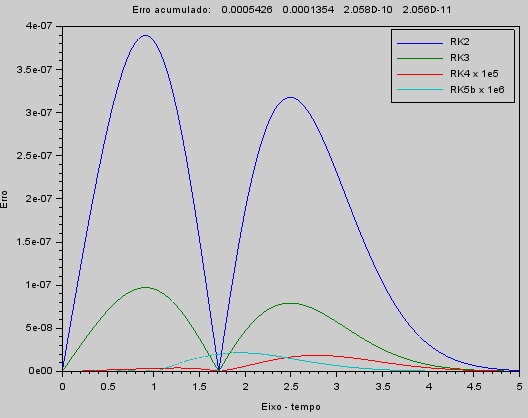 |
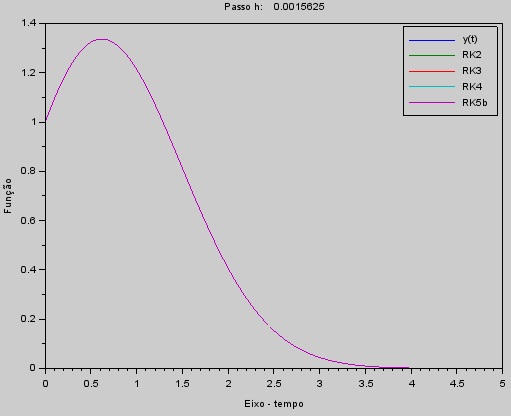
| Os métodos de ordem mais alta apresentam uma redução do erro ainda melhor que os métodos de baixa ordem. |
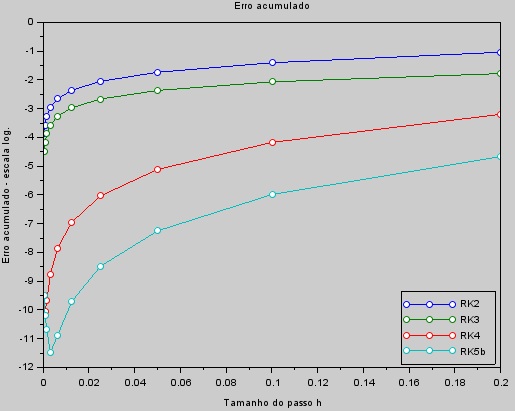 |
| Erro acumulado em função do passo $h$. |
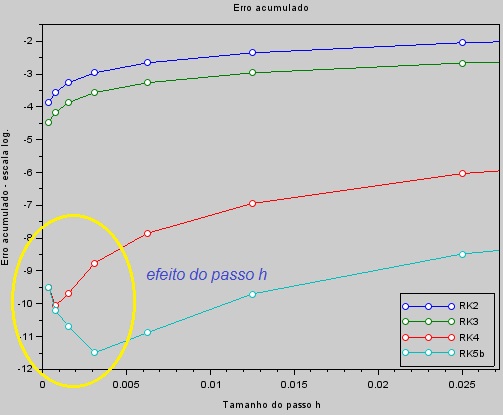 |
| "Zoom" da figura anterior: se o passo for muito pequeno, erros de arrendondamento predominam e diminuem a acurácia. |
Código Scilab:
//// Runge-Kutta: comparações clc; clear; xdel(winsid()); // limpando e fechando janelas function f=fd(x, y) //função - EDO // f = 9.8 - 0.1*y.*y; f = exp(-x.*x/2) - y.*x; // f = -y +2*exp(-x).*cos(2*x); // f = 2*y./(exp(x)+1) + (2.0)./(exp(2*x)+2*exp(x)+1); // f = -2*y + 2*x.*exp(-2*x); endfunction function g=ff(x) //função - solução analítica k = 7*sqrt(2)/5; // g = sqrt(98)*(1-exp(-k*x))./(1+exp(-k*x)); g = (x+1).*exp(-x.*x/2); // g = exp(-x).*sin(2*x); // g = (exp(x)-1)./(exp(x)+1); // g = x.*x.*exp(-2*x); endfunction h = 0.4; // passo inicial vh = zeros(10,1); verros = zeros(10,4); v1 = 1-sqrt(1/2); v2 = 1+sqrt(1/2); for kh=1:10 h = h/2; vh(kh) = h; fim = round(5/h); x0 = 0; y0 = ff(x0); xk = x0; x = zeros(1,fim); x(1) = x0; y2 = zeros(1,fim); y2(1) = y0; y2k = y0; // RK-2 y3 = zeros(1,fim); y3(1) = y0; y3k = y0; // RK-3 y4 = zeros(1,fim); y4(1) = y0; y4k = y0; // RK-4 y5b = zeros(1,fim); y5b(1) = y0; y5kb = y0; // RK-5b for k=2:fim // RK2: k1 = h*fd(xk,y2k); k2 = h*fd(xk+h,y2k+k1); y2k = y2k + (k1 + k2)/2; y2(k) = y2k; // RK3: k1 = h*fd(xk,y3k); k2 = h*fd(xk+h/2,y3k+k1/2); k3 = h*fd(xk+h,y3k+k2); y3k = y3k + (k1 + 2*k2 + k3)/4; y3(k) = y3k; // RK4: k1 = h*fd(xk,y4k); k2 = h*fd(xk+h/2,y4k+k1/2); k3 = h*fd(xk+h/2,y4k+k2/2); k4 = h*fd(xk+h,y4k+k3); y4k = y4k + (k1 + 2*(k2 + k3) + k4)/6; y4(k) = y4k; // RK5 - Butcher: k1 = h*fd(xk,y5kb); k2 = h*fd(xk+h/4,y5kb+k1/4); k3 = h*fd(xk+h/4,y5kb+(k1+k2)/8); k4 = h*fd(xk+h/2,y5kb+(k3 - k2/2)); k5 = h*fd(xk+3*h/4,y5kb+(3*k1 + 9*k4)/16); k6 = h*fd(xk+h,y5kb+(-3*k1+2*k2+12*k3 - 12*k4+8*k5)/7); y5kb = y5kb + (7*k1 + 32*k3 + 12*k4 + 32*k5 + 7*k6)/90; y5b(k) = y5kb; xk = xk + h; x(k) = xk; end ya = ff(x); // função analítica - teórica. // Erros e somas dos erros absolutos: e2 = abs(y2-ya); s2 = sum(e2); e3 = abs(y3-ya); s3 = sum(e3); e4 = abs(y4-ya); s4 = sum(e4); e5b = abs(y5b-ya); s5b = sum(e5b); verros(kh,:) = [s2, s3, s4, s5b]; if kh==1 then // Gráficos: figure; plot(x,ya,x,y2,x,y3,x,y4,x,y5b); title(['Passo h: ',string(h)]); xlabel('Eixo - tempo'); ylabel('Função'); legend('y(t)','RK2','RK3','RK4','RK5b'); figure; plot(x,e2,x,e3,x,e4*100,x,e5b*1e3); legend('RK2','RK3','RK4 x 100','RK5b x 1e3'); title(['Erro acumulado: ',string([s2, s3, s4, s5b])]); xlabel('Eixo - tempo'); ylabel('Erro'); end; if kh==8 then // Gráficos: figure; plot(x,ya,x,y2,x,y3,x,y4,x,y5b); title(['Passo h: ',string(h)]); xlabel('Eixo - tempo'); ylabel('Função'); legend('y(t)','RK2','RK3','RK4','RK5b'); figure; plot(x,e2,x,e3,x,e4*1e5,x,e5b*1e6); legend('RK2','RK3','RK4 x 1e5','RK5b x 1e6'); title(['Erro acumulado: ',string([s2, s3, s4, s5b])]); xlabel('Eixo - tempo'); ylabel('Erro'); end; end; // Erros em função do passo h: verros = log10(verros); figure; plot(vh,verros,'-o'); legend('RK2','RK3','RK4','RK5b',4); title('Erro acumulado'); xlabel('Tamanho do passo h'); ylabel('Erro acumulado - escala log.');
Nenhum comentário:
Postar um comentário